���ϴ�W(xu��)��Ϣ�ƌW(xu��)�c���̌W(xu��)Ժ ���� ���Sƽ ���ѝ�
ժ Ҫ��ͨ�^������������������W(xu��)����������(j��)�C(j��)���˱����ĽY(ji��)��(g��u)���c(di��n)������W(xu��)ԭ�������M(j��n)�������ں������}�����c�о��ļ��O(sh��)��������I(y��)�C(j��)���˵Ą�(d��ng)���W(xu��)ģ�ͺ�Һ���(q��)��(d��ng)ϵ�y(t��ng)ģ�����������Ď���������ԭ������ʾ�˻��D(zhu��n)���c�����l�����P(gu��n)ϵ���C������I(y��)�C(j��)����ģ�ͽ������Ի��D(zhu��n)�ʿ��ƞ�Ŀ��(bi��o)�ķ�������ϵ�y(t��ng)������څ���ɷ���������ģ׃�Y(ji��)��(g��u)���ƹ��еĶ���F(xi��n)������(y��ng)�û��ڸ���ϵ��(sh��)�ͻ��D(zhu��n)�������Π�ı��R(sh��)��������ͨ�^�R�_(d��)�D(zhu��n)�غ��Ď��Ǽ��ٶȵõ���ѻ��D(zhu��n)��ֵ��ͨ�^����Y(ji��)������������ϵ�y(t��ng)�܉����(j��)��ͬ�ĺ���������r�A(y��)�y(c��)��ѻ��D(zhu��n)�ʲ�����(sh��)�H���D(zhu��n)�ʿ��������ֵ������ͬ�r(sh��)�(q��)��(d��ng)���ص�׃��Ҳ���^ƽ��(w��n)���܉��C��C(j��)���������^�̵İ�ȫ��Ҫ����
�P(gu��n)�I�~������I(y��)�C(j��)���� �������� ��ģ׃�Y(ji��)��(g��u) ���D(zhu��n)��
1����
����I(y��)�C(j��)������һ�N��ˮ��5000~6000���ĺ��׳��e�����������ɼ��i�Y(ji��)�˵������Ď�܇�v���ɗl�Ď��ɰ��b�ں�݆�ϵă��_(t��i)Һ���R�_(d��)�քe�(q��)��(d��ng)����׃�����{(di��o)��(ji��)�ٶ����҇��ɵV�^(q��)λ��̫ƽ���в�������͵��ƽԭ�����ϸ��w���ܺ�����༰���e��[1]�����׳��e�ﲻͬ��ꑵص��|(zh��)�����Џ�(qi��ng)���^�ͣ����Д���(d��ng)���w�������������ԡ��������I(y��)�C(j��)���˵�����(q��)��(d��ng)���c���e�����Բ�ƥ�䣬�����F(xi��n)�Ď��^�ȴF(xi��n)�����鱣�C����I(y��)�C(j��)���˵İ�ȫ���ߣ���(y��ng)ʹ�����(q��)��(d��ng)���m�ϳ��e�����Ե�׃���������������}����Ď�ʽ���I(y��)�C(j��)�������߷������Ƽ��g(sh��)���о��_�l(f��)����������ɵVϵ�y(t��ng)��ȫ���I(y��)ˮƽ��
����C(j��)�������߷������g(sh��)�����P(gu��n)�о���Daegun Hong��Paljoo Yoon[2]�����һ�N�����Ƅ�(d��ng)�^�y(c��)���ķ�������ϵ�y(t��ng)���Ƅ�(d��ng)�^�y(c��)��ؓ(f��)؟(z��)�u(p��ng)��܇݆�Ƅ�(d��ng)������(c��)������Ħ��ϵ��(sh��)��׃��������(n��i)���P(gu��n)�о�����־�¡������l(w��i)������[3]��������݆�(q��)��(d��ng)��܇�����^�̵Ĕ�(sh��)�W(xu��)ģ�����Ի��D(zhu��n)�ʞ��{(di��o)��(ji��)��(du��)�����һ�N����ģ��PID���Ƶ��(q��)��(d��ng)��������ASR�㷨��Ŀǰ����(n��i)�⌦(du��)�Ď�܇�v�����������P(gu��n)���g(sh��)��̎�����A�Σ���(du��)��(f��)�s�����µ�����I(y��)�C(j��)��������(sh��)��Ҫ���˂���(du��)�C(j��)�����c��������������������|(zh��)�R(sh��)�e�Լ�������������������о���Ҳ�،����M(j��n)�˂���(du��)�@Щ���}���J(r��n)�R(sh��)��
���ĸ���(j��)����I(y��)�C(j��)�������ߵ����c(di��n)�ͺ��h(hu��n)�������c(di��n)������������I(y��)�C(j��)���˵����W(xu��)ģ����������(j��)�C(j��)�����(q��)��(d��ng)ϵ�y(t��ng)�ĽY(ji��)��(g��u)�����c(di��n)������Һ��ϵ�y(t��ng)ģ�����O(sh��)Ӌ(j��)�˙C(j��)���˷�������ϵ�y(t��ng)���������ѻ��D(zhu��n)�ʵı��R(sh��)����������MATLAB����ƽ�_(t��i)����(du��)����(g��)����I(y��)�C(j��)���˷�������ϵ�y(t��ng)�M(j��n)�з�����[1]
2 ����I(y��)�C(j��)���˹����h(hu��n)�������о�
(1)���������W(xu��)����
����I(y��)�C(j��)�����Ď��c���������ʮ�֏�(f��)�s���D1����͵ĺ�����e��׃���^��ʾ��D��s�麣����(y��ng)׃��p�麣�����܉����������܉��r(sh��)���ƉĿɷ֞�����(g��)�^��[4]��
ֱ��׃���A�Σ������A�Σ�����(d��ng)�Ď���(du��)����ĉ��dС���R����d�r(sh��)�����౻���o�������܉���F(xi��n)�鏗�Ԡ�B(t��i)����D1ʾ��a�c(di��n)֮ǰ��
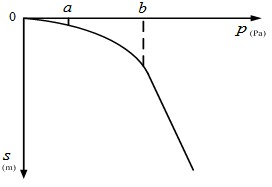
�D1 ����׃���^��ʾ��D














��0�l [�鿴ȫ��] �W(w��ng)���u(p��ng)Փ