3����I(y��)�C(j��)����ģ��
(1)����I(y��)�C(j��)���˄�(d��ng)���W(xu��)ģ��
�O(sh��)�C(j��)��܇���ĺ͎������غϣ��ӵضε��������Ԟ����ͬ�����Ď��ӵضε�ؓ(f��)�ɺ������ֲ������ֲ���
��(d��ng)�C(j��)��܇ֱ���\(y��n)�Еr(sh��)���Æ��Ď�܇�wģ�ͣ�
(3)
ʽ����M����C(j��)���ˆ�(c��)ģ���|(zh��)����kg��J���Ď��(q��)��(d��ng)݆����(du��)���D(zhu��n)�S���D(zhu��n)��(d��ng)�T����kg·m2�� ω���Ď����D(zhu��n)��(d��ng)���ٶ���rad/s��FxL���Ď��c�������g�ĸ�������N��FyL���Ď��ĉ���(sh��)������N��FtL���Ď�������������N��Fw����C(j��)���˺�ˮ������N��TmL�����Ď��R�_(d��)�(q��)��(d��ng)������N·m��R���(q��)��(d��ng)��Ч�돽��m��
(2)Һ������(d��ng)ϵ�y(t��ng)ģ��
�ڙC(j��)��܇���ϵ�y(t��ng)�в���׃���ã������R�_(d��)���ݷe�{(di��o)�ٻ�·��������늿�׃�������Һ���������y����Һ����׃������б�P�A�ǵķ�ʽ��׃�����õ��������Ķ���(sh��)�F(xi��n)Һ��ϵ�y(t��ng)�������������Һ���������y��(sh��)�W(xu��)ģ�ͣ��������U�D(zhu��n)׃?y��u)��yо��λ����xv���C(j��)е�D(zhu��n)�QԪ��ֱ���(q��)��(d��ng)�yо�\(y��n)��(d��ng)���Ķ���ݔ��늉���̖(h��o)
����늴��F���ƾ�Ȧ�Ķ�늉��������̣�
ΔU(s)=LsΔI(s)+(Rc+Rp)ΔI(s)+Kesxv(s) (4)
��F�M���Ą�(d��ng)�B(t��i)��ƽ�ⷽ�̣�
KIΔI(s)=mTs2xv(s)+BTsxv(s)+(ks+ky)xv(s)+T(s) (5)
�yо��(d��ng)�B(t��i)��ƽ�ⷽ�̣�
T(s)=[mvs2+Bvs+(Kv+Kfv)]xv(s) (6)
ʽ����L����Ȧ늸���H��Rc��Rp����Ȧ�ͷŴ�����(n��i)����Ω��Ke����Ȧ�Б�(y��ng)��늄�(d��ng)��(sh��)ϵ��(sh��)��v��KI������늴��F�����������N/A��mT����F�M���|(zh��)����kg��BT������ϵ��(sh��)��N·s/m��Ks����F�M���ď��Ʉ�����N/m��mv���yо�|(zh��)����kg��Bv���yо��ճ������ϵ��(sh��)��N·s/m��Kv���yо��(du��)�Џ��Ʉ��ȣ�N/m��Kfv���������yо�ϵķ�(w��n)�B(t��i)Һ��(d��ng)������ϵ��(sh��)��N/m��ΔI����Ȧ�����A��Ky������늴��F��λ����������{(di��o)�㏗�ɵĄ���֮�ͣ�N/m��T����F��ؓ(f��)�d��N��
���������y��ģ�Ϳ�D���D3��ʾ��
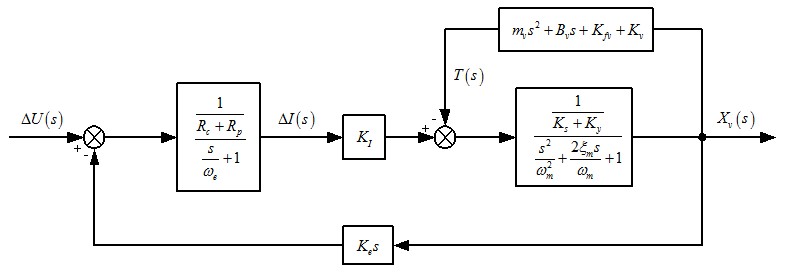
�D3 �����y���f����(sh��)��D














��0�l [�鿴ȫ��] �W(w��ng)���u(p��ng)Փ