
�D3 �������̈D
��u=uk-uk-1=Kp��ek-ek-1��+KITsamek ��1��
ʽ��ek�鱾���`��ֵ��ek-1���ϴ��`��ֵ��Tsam��ɘӕr(sh��)�g��Kp��KI�����Ɍ�(sh��)�(y��n)������Matlab����ó����a�P�y�õ��ٶȞ� ��
n×2π/100/T ��2��
ʽ��T��ɘ�������N����}�_��(sh��)��늙C(j��)�{(di��o)��(ji��)�ӳ������̈D��D4��ʾ��
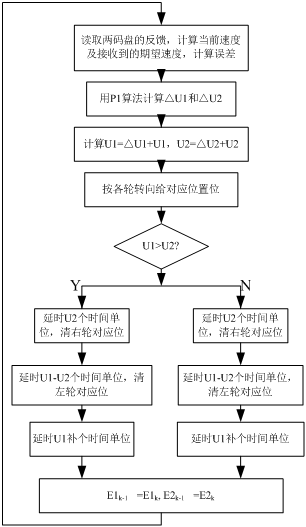
�D4 늙C(j��)�{(di��o)��(ji��)�ӳ������̈D














��0�l [�鿴ȫ��] �W(w��ng)���u(p��ng)Փ